Newly developed, compatible with Open-Cube. UART communication, similar to EV3 sensors
Currently, five sensors have been developed and produced in a small series of several tens of pieces (LIDAR, RGB-optical, Ultrasonic, Touch and AHRS).
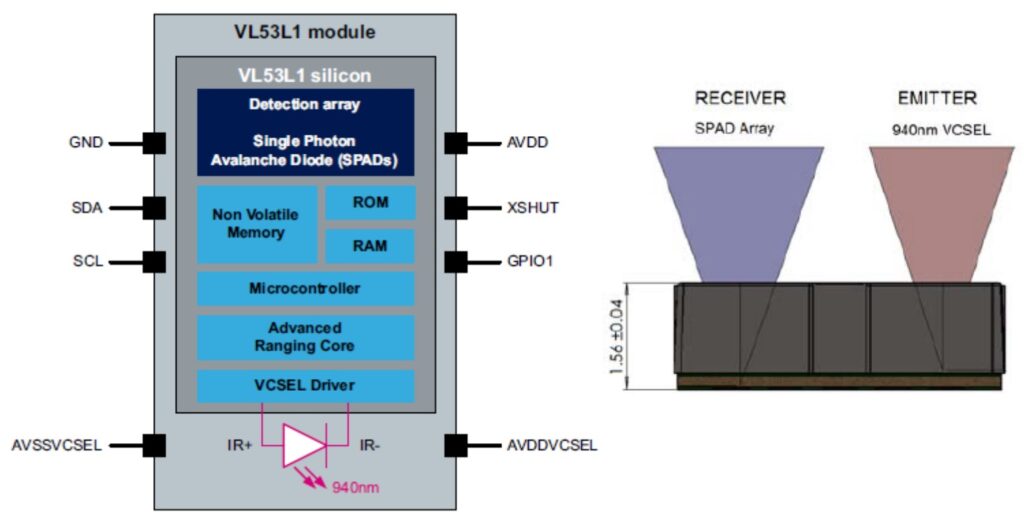
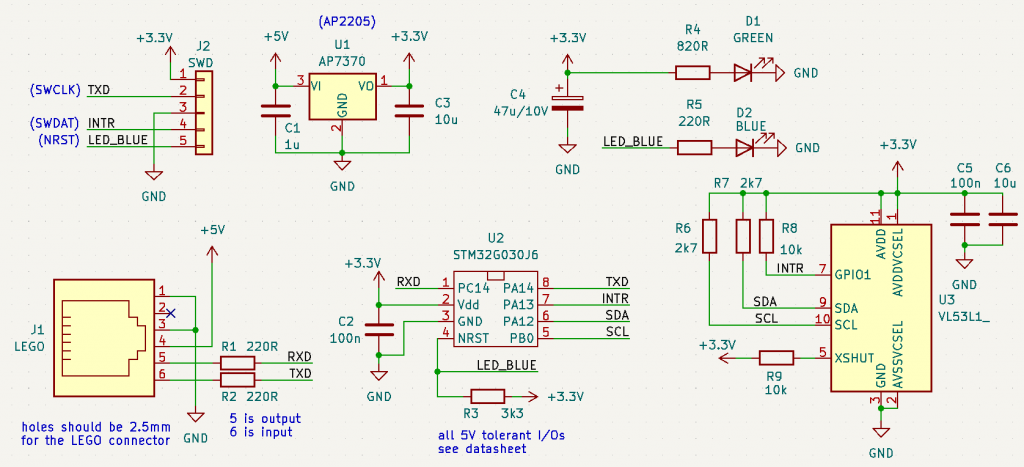
LIDAR – laser distance sensor
Based on ST.com VL53L1 – Time-of-Flight (ToF) ranging sensor – can measure distance from 40 mm up to 3000 mm or more.
VL53L1CB sensor block diagram by st.com. The sensor offers huge amount of features, currently we use just simple single object ranging with two possible field of view settings.
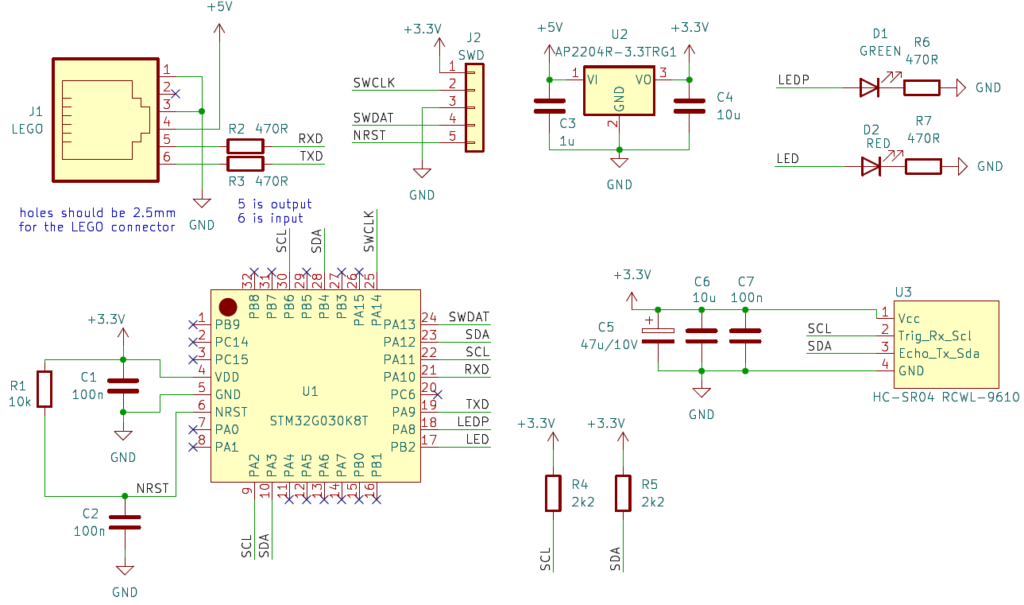
LASER distance sensor circuit diagram
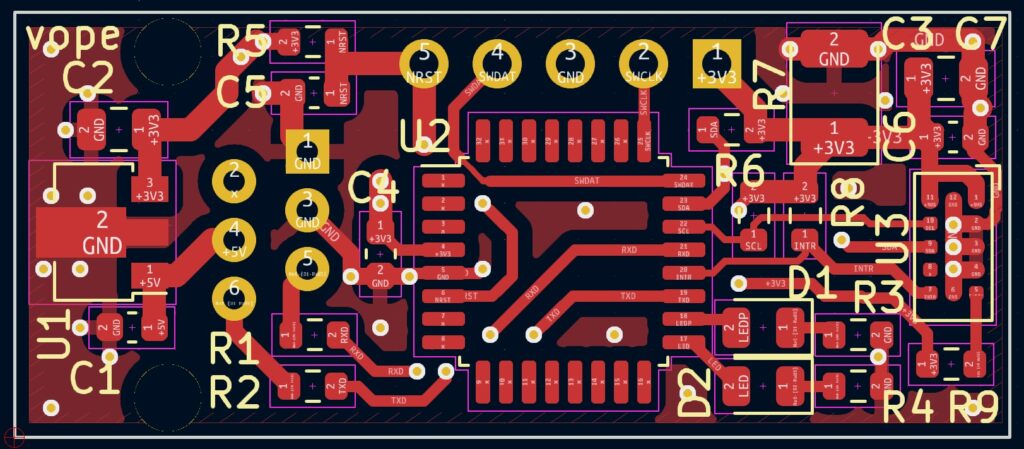
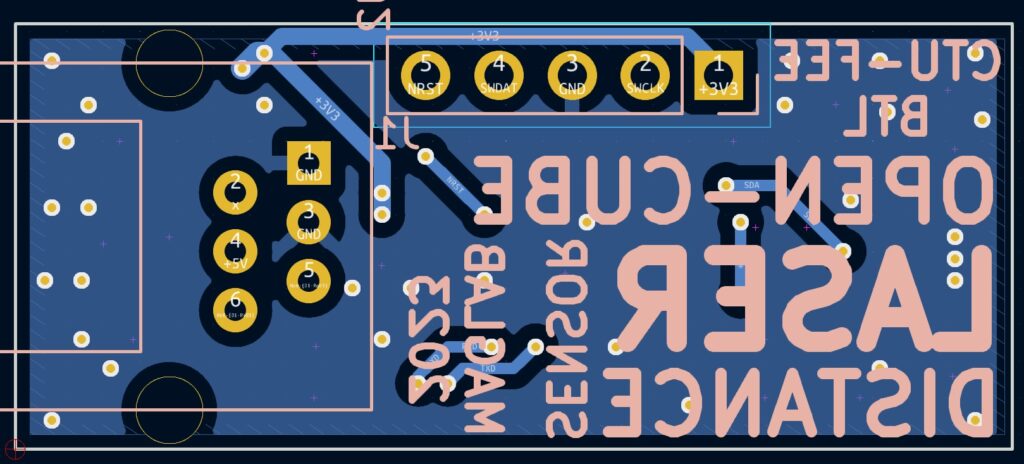
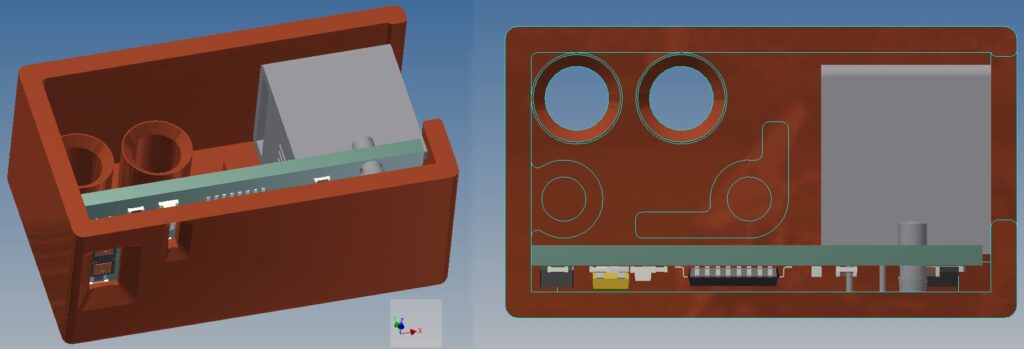
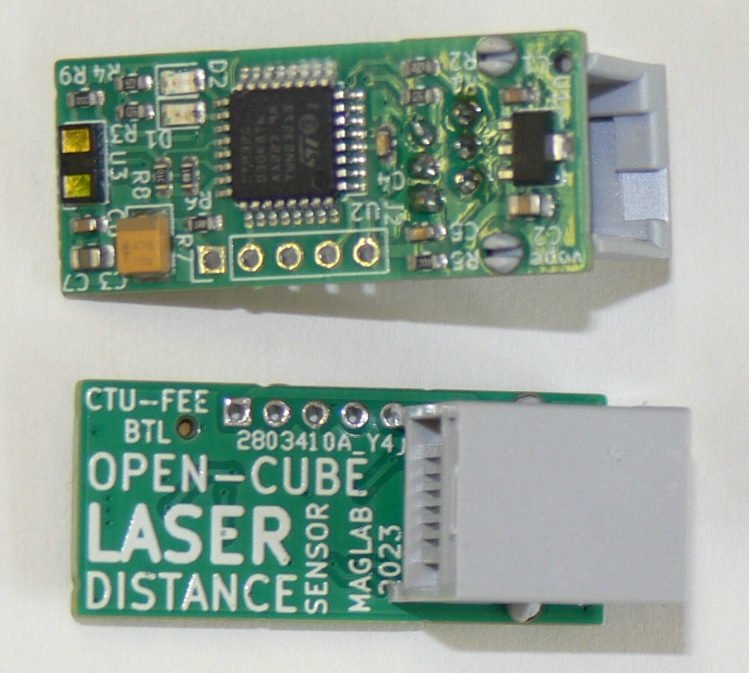
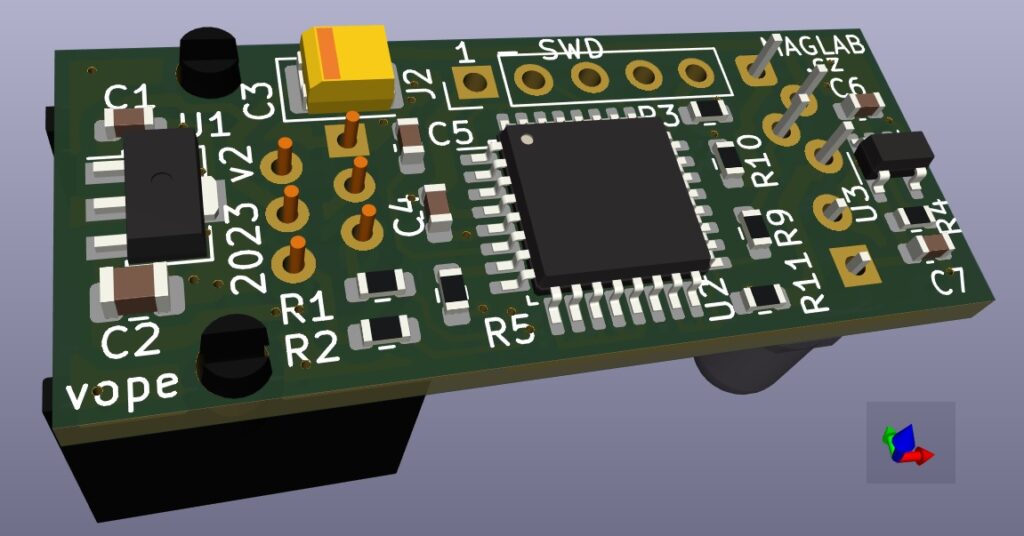
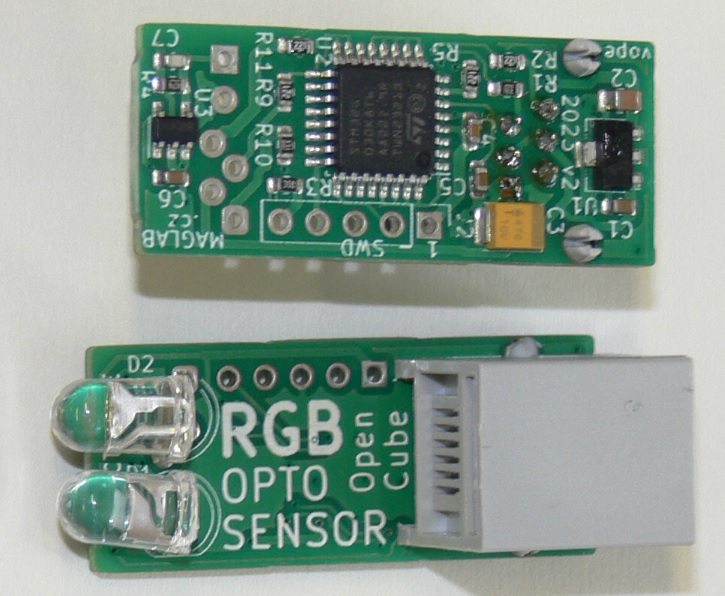
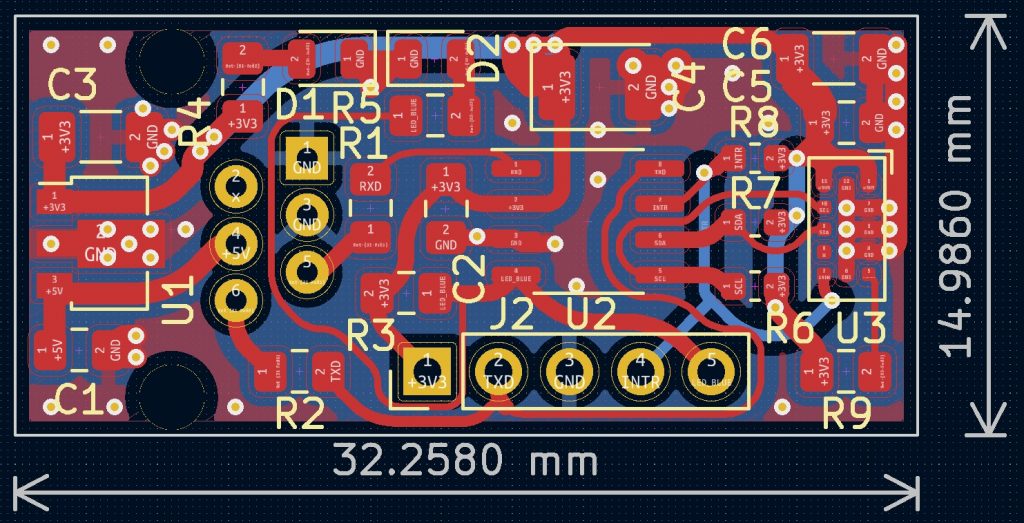
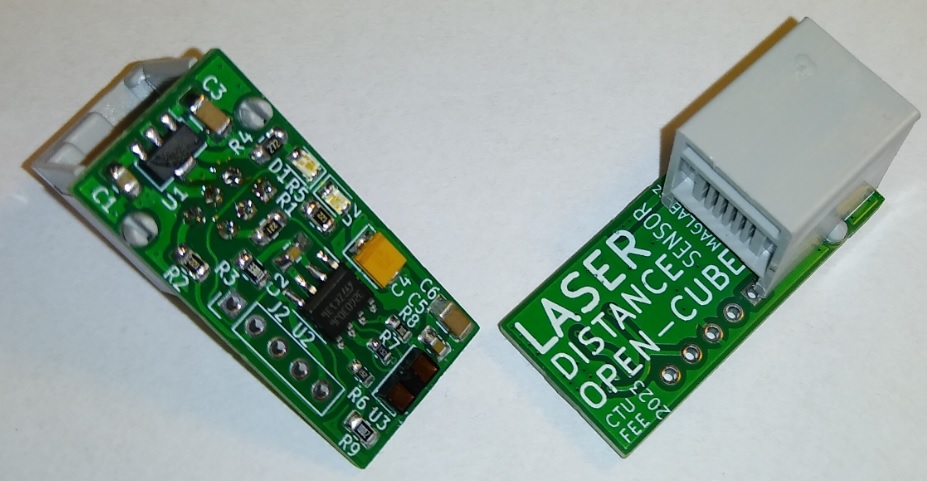
PCB – top sidePCB – bottom sideKiCAD 3D model – helps to properly design the whole sensorKiCAD 3D model exported into CAD software for more precise package designPhoto of the fully assembled sensor – PCB manufactured and SMD components soldered by JLCPCB.com, connectors were soldered in-house.LASER ToF rangefinders in the 3D printed box
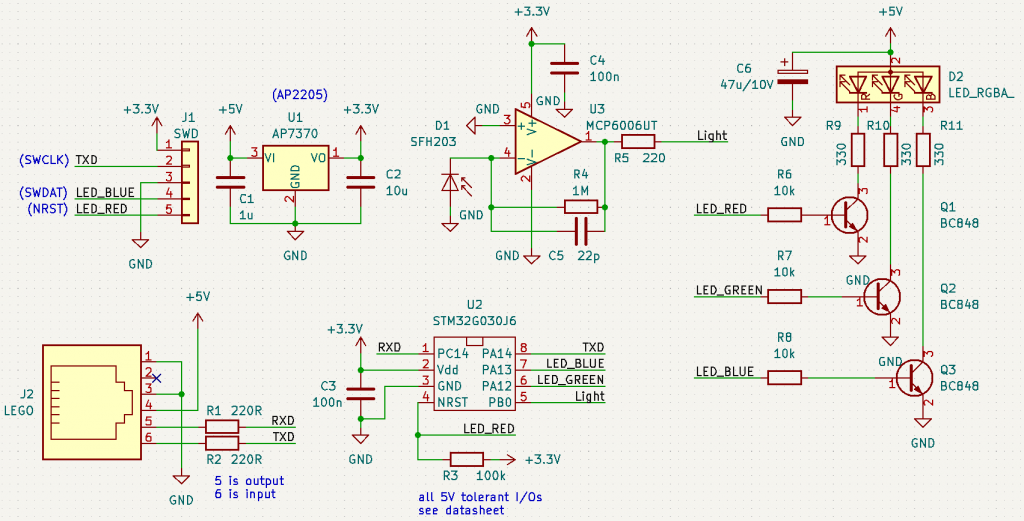
Optical reflective sensor, color sensor
A classic sensor for a line-following robot, any object detection or color recognition….
In this version, the external switching transistors used in v.0 have been replaced by available multiple GPIOs connected in parallel, configured as open-collector outputs and controlled “synchronously” via direct writes to the BSRR registers. The bigger STM32G030K8 was used instead of the J6 (SOIC-8) version because it was available in stock at jlcpcb, where the manufacturing was relatively cheap (when compared for example with allpcb).
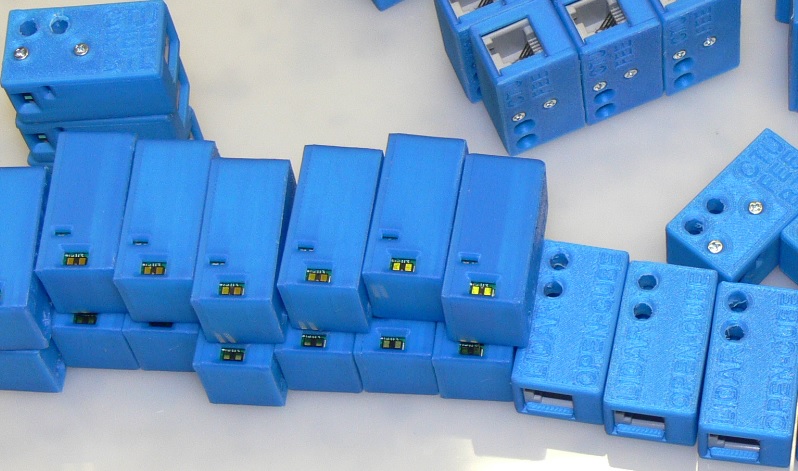
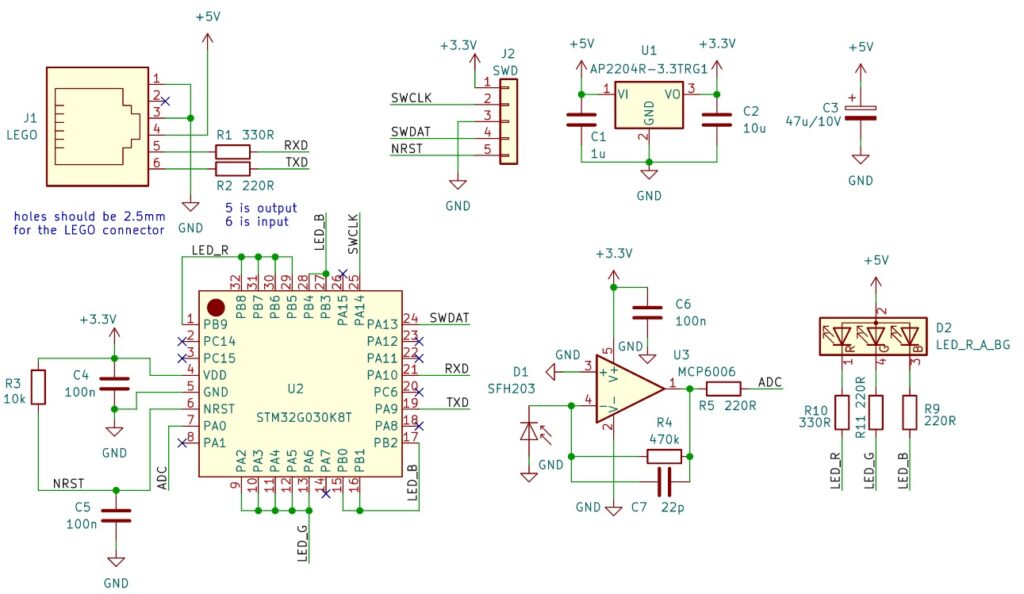
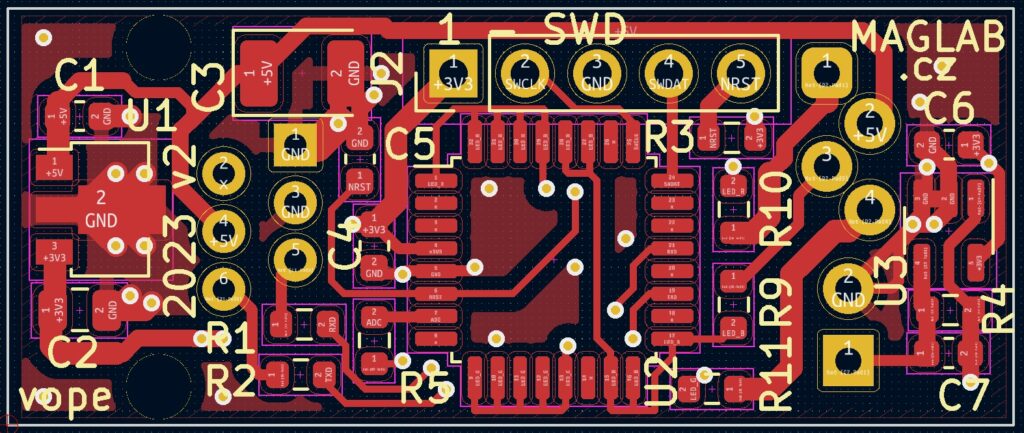
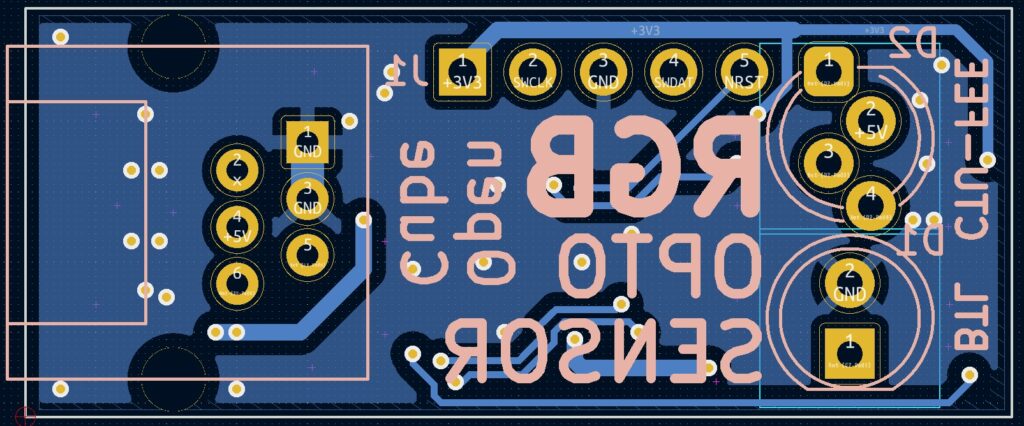
RGB sensor v.1 circuit diagram, RGB LED is Dialight 521-8559RGB sensor v.1 PCB – top sideRGB sensor v.1 PCB – bottom side3D model from KiCAD PCB editorFirst assembled pieces in a series of 50 produced by JLCPCB.com (connectors, RGB LED and photodiode soldered in-house).RGB sensors in the 3D printed box
Ultrasonic rangefinder
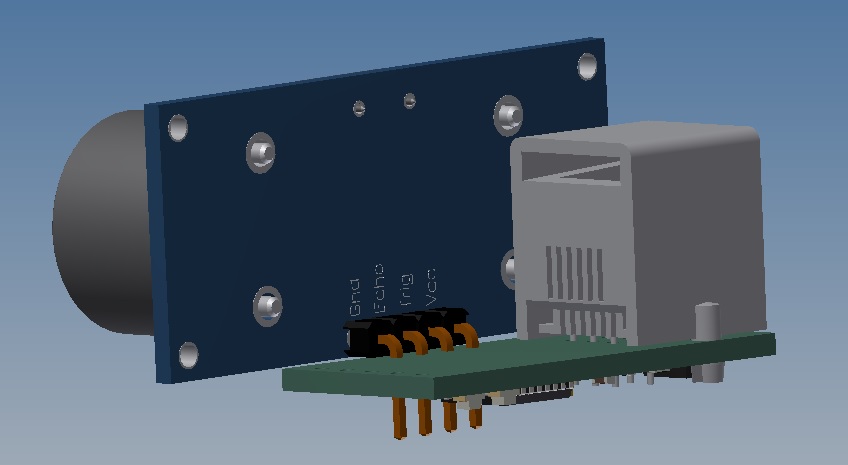
…will appear here soon…. HC-SR04 RCWL-9610 + STM32G030K8 with LDO and LEGO connector
Commercial HC-SR04 ultrasonic rangefinder module available for 1-2 USD from various sources (Aliexpress, Ebay, Laskakit, Hadex…)3D model of the HC-SR04 + LEGO adaptor combo, front side3D model of the HC-SR04 + LEGO adaptor combo, back sideCircuit diagram of the adaptor board – the sense is to have the same communication protocol as uses EV3 ultrasonic (compatible with Open-Cube)Adaptor PCB 3D model from KiCAD 7.0Ultrasonic sensor enclosure prototype
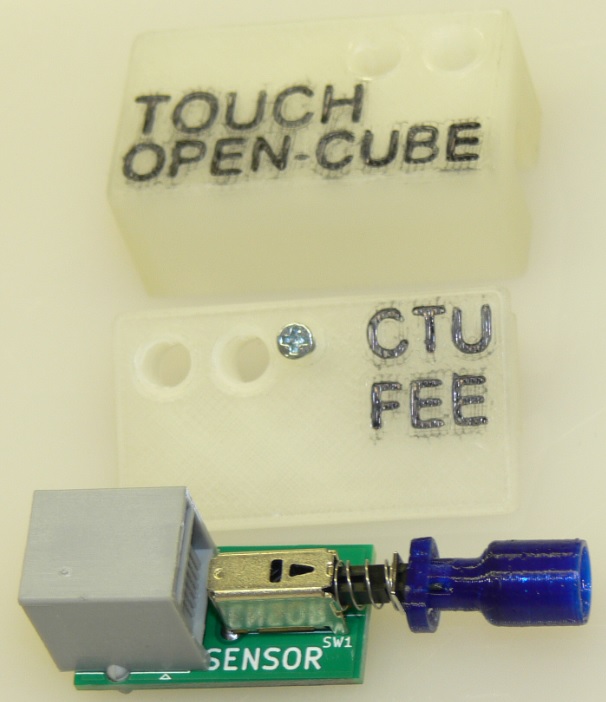
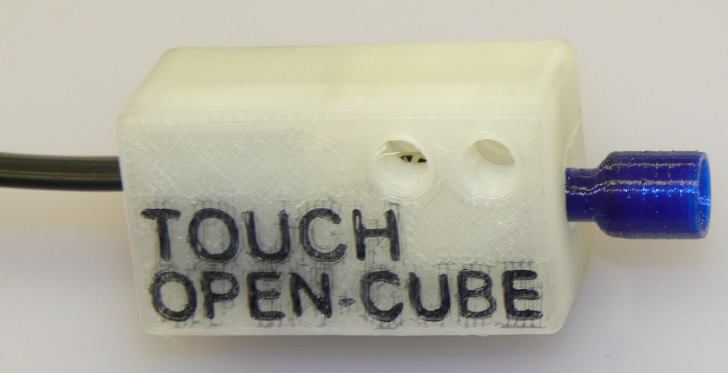
Touch sensor
PN11SBNA03QE (need to be tested for actuating force…) + 2k2 resistor + LEGO connector
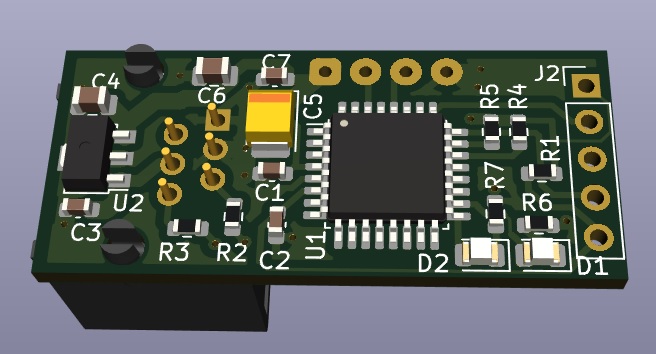
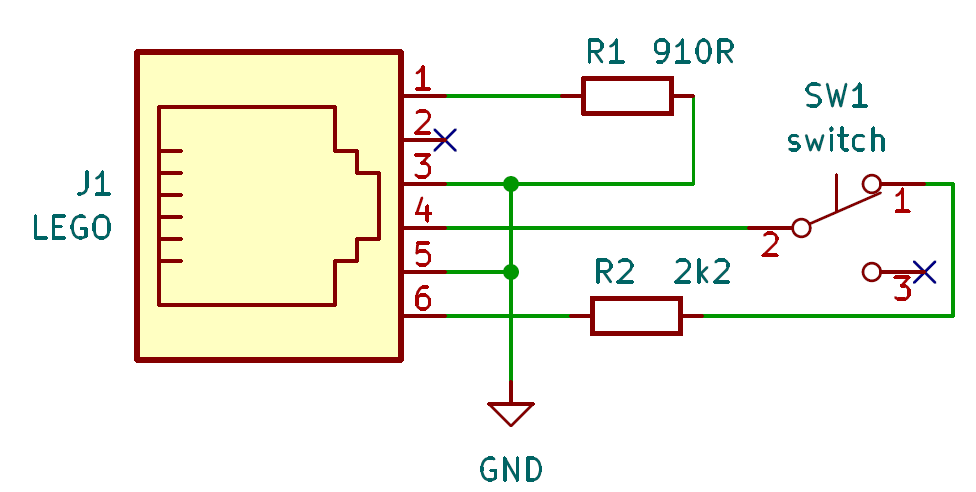
Circuit diagram of the Open-Cube touch sensor (copy of EV3 touch sensor)PCB for the touch sensor
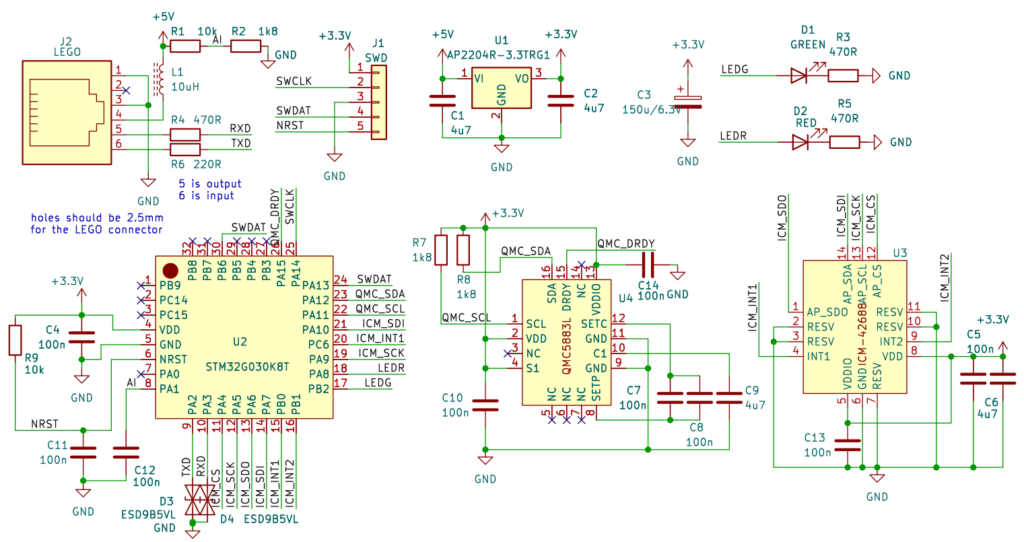
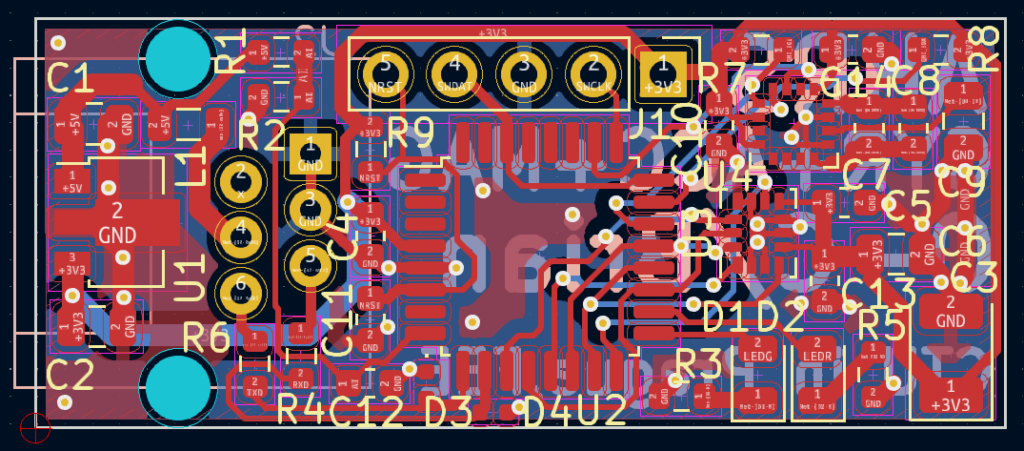
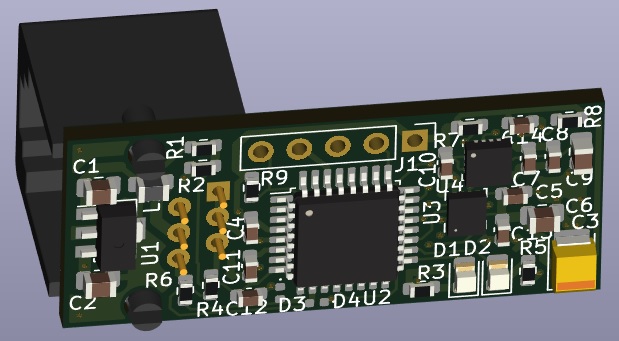
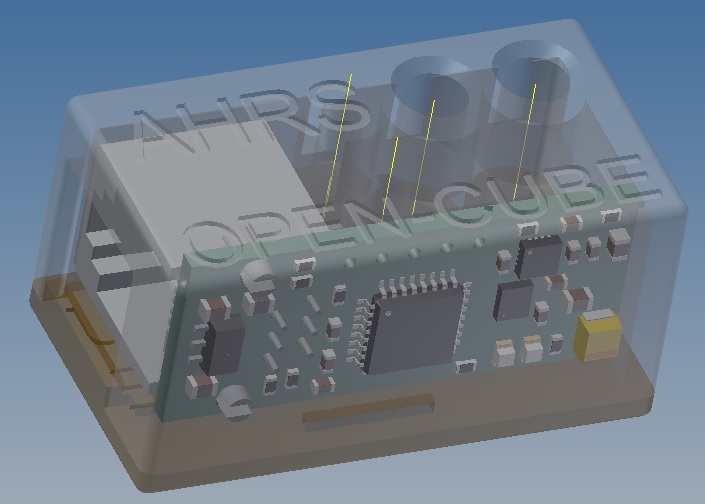
AHRS sensor
“Attitude and Heading Reference System” – the sensor combines triaxial MEMS accelerometer & triaxial gyroscope (ICM42688) and triaxial AMR magnetometer (QMC5883L) into one sensor. It can provide each quantity individually or combined using a dedicated algorithm (Fusion* algorithm)
Circuit diagram of the AHRS sensorPCB design of the AHRS sensor3D of the PCB provided by KiCADThe AHRS sensor is equipped with a 3D printed box similar to the other sensors… (two parts joined by screws, thread inserts used…)
Version 0 – sensor prototypes based on STM32G030J6 32-bit AMR microcontroller in 8-SOIC package
LASER distance sensor v.0 circuit diagram (based on STM32G030J6 in SOIC-8)PCB design (test of tracks rounding plug-in for KiCAD…. just for fun…)Two sensors assembledDEVkit for firmware development with STM32G030K8 with more IO-pins, so one can easily connect to SWD via STLink3,, power comes through TTL232R-3V3 FTDI cable and HT7533 LDO, otherwise programming the 8-pin microcontroller is pain-in-the-ass…
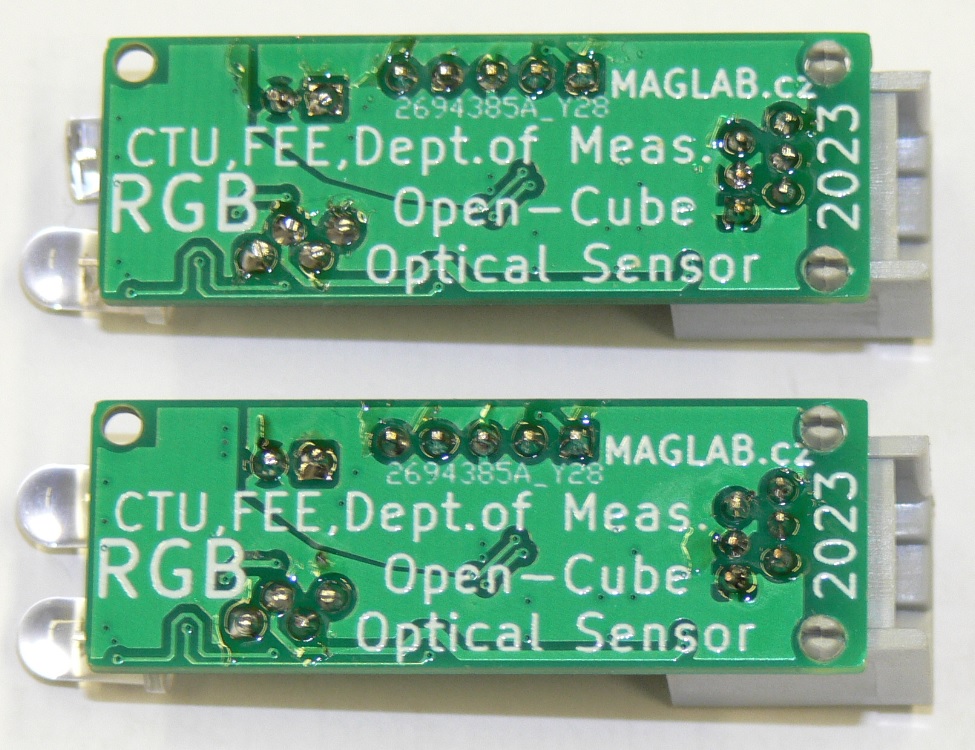
RGB sensor v.0
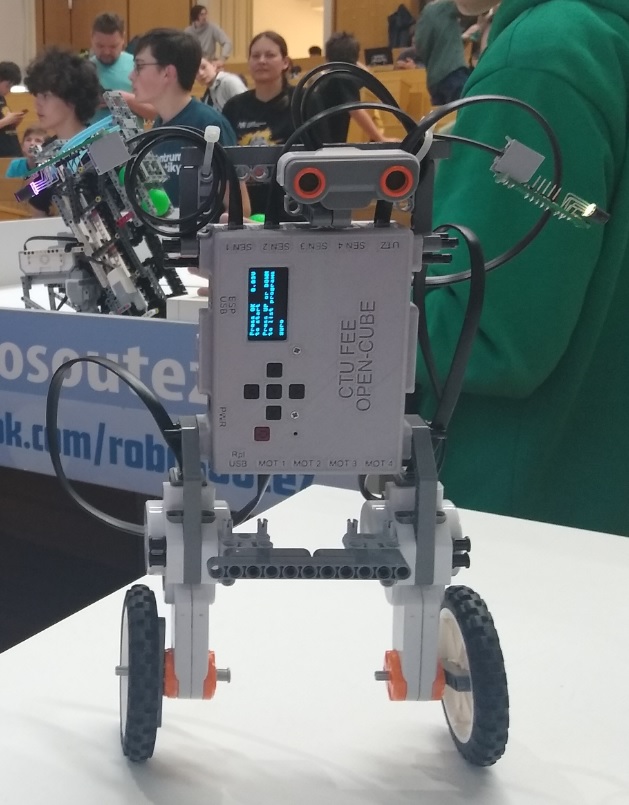
RGB sensor circuit designOpen-Cube RGB sensor (two variants with different photodiode field of view – to test what is better…)First optical sensors up and running in demo-mode during Robot-competition 2023 at CTU-FEE